We all remember Baymax, the big white robot from the movie Big Hero 6. Ever wondered how cool it would be to have such soft robots all around us? Yes, researchers are working on soft, squishy robots which might bring up a revolution in the robotics industry. In India, IIT Indore, IIT Delhi and IIT Madras have already begun innovation on soft robots. This branch of robotics, called “Soft Robotics” is aimed at building shape-shifting robots from tensegrity structures (characteristic properties of a stable three-dimensional structure where members under tension are contiguous but members under compression are not). These robots are expected to change their form under different circumstances, depending on the necessity of conditions.
Soft robotics is expected to have a vast range of applications stretching from the macro to the micro-level. The Berkeley Emergent Space Tensegrities (BEST) Lab under Dr. Alice Agogino has been funded by NASA to create a shape-shifting tensegrity planetary rover that achieved unique records in the ability to tread on rough terrain in Moon simulations and physical testing on Earth. On the contrary, researchers at MIT have been preparing squishy robots for micro tasks at the living tissue level. A semi-solid robot changing into a fluid substance that can easily fit through gaps, and adjust according to available space like an alien creature in a Hollywood movie, is no longer limited to just fiction!
What are squishy robots made of?
It is only imaginable that something like squishy robots will be made of extraordinary and unusual material. There are a few properties that are needed to make efficient robots.
Soft jelly-like substances may be easily accommodated, but rigidity is an absolute requirement for picking up things or having a firm grip. The material should be able to transform itself from a rigid to non-rigid state as required.
It would be an inevitable disaster if such robots are damaged in a process and are unable to heal themselves. Thus, such robots should have self-healing properties.

Flexibility of material – State of the art:
This might sound a bit complicated, but the researchers at MIT found out a rather simple material, foam in wax. You can simply put a polyurethane foam in a melted wax bath and exploit the properties of foam and wax both. The foam was chosen because of its remarkable compressive properties and wax because it can easily change from hard to soft form depending on temperature, which can be controlled by a wire carrying current. Also, heating the wax would reduce it to liquid form, which will heal any kind of damage in the structure. Notably, this material is also low cost and sounds simple. Annette Hosoi, a professor of Mechanical Engineering and Applied Mathematics at MIT, also speaks on the possibility of using unconventional materials like magnetorheological and electrorheological fluids. These are fluids with particles suspended inside and can be changed from solid to liquid forms by applying magnetic and electric fields, respectively.
Advantages of a soft robot
Soft robots are expected to have a wide variety of advantages and use over hard and rigid robots. They can squish, twist, turn, wrap around objects, something quite unimaginable with rigid robots.
- Adds the feature of tensegrity for impact resistance
- Function in rough and uneven terrain without damage
- Can fuse data for diagnostics, supervisory and manufacturing control
- Applicable in almost all realms
Squishy Robotics, a new startup based in Berkeley, claims the HazMat (Hazardous Material) and the CBRNE (Chemical, biological, radiological, nuclear and explosive) industry as their target markets. Their technology is a fusion of robotics, mobile sensing, ML, big data fusion and smart IoT (Internet of Things). This emergent technology they believe can be used for space research, disaster management, and remote monitoring. There would be origami robots that can perform surgeries, squeeze through awkward places inside our bodies, without affecting the vital organs, maybe even hold one organ with one arm and perform surgeries with the other arm. Or perhaps a robot that can change form and slide through a door gap.
Soft Robotics Labs in India
IIT Indore develops Jellyfish Type Soft Robot
The Mechatronics and Instrumentation lab of Indian Institute of Technology Indore headed by Professor I A Palani, has developed a soft robotic jellyfish that can observe marine life without influencing their behaviour. This robot is noiseless, unlike the hard mechanical robots containing motors. Shape metal alloy (SMA) is the smart material used here, which claims to retain its shape and can recover from induced deformation. We were fortunate to interact with him on his innovation, and he has answered them beautifully.
- We contacted Prof. I A Palani, of IIT Indore who developed a soft robotic jellyfish in his lab. Here is an excerpt of what he said about his project:
1) What was the inspiration behind this project?
Ans: Conventional bio-inspired robots are made of rigid materials and complicated mechanisms actuated by motors, that limit their performance due to lack of flexibility. Marine life monitoring based on conventional motor-driven bio-inspired robot creates more noise, and it may disturb the marine species. In this project, the alternative actuators based on soft materials have been explored which are capable of producing flexible and complex movements.
2) What is the advantage of using the jellyfish model over other marine species?
Ans: Many different aquatic animals have provided inspiration for novel robot design features, including the octopus, turtle, fish, manta ray, and jellyfish. Among these, jellyfish have been classified as highly efficient swimmers, so they are an excellent candidate for underwater robot design inspiration.
3) It has been stated this robot has been specially made to observe without causing any harm to marine life. But what features have the robot been bestowed with in order to protect itself in such high pressure and rough terrains in the ocean bed?
Ans: The proposed shape memory alloy-based jellyfish robot is a noiseless actuator which enables it to go near marine species without disturbing it. The proposed SMA/polyimide composite flexible structure can protect itself from high pressure and rough terrains in the ocean bed. The robot has an inbuilt camera in it to capture the rough terrains and objects and send a signal to the remote control location in case of any emergency.
4) Many marine species are known for being hostile to each other. How will the robot protect itself under such circumstances? How is it designed to react to stimuli?
Ans: The SMA wire produces heat during actuation, which can protect itself from other creatures. The inbuilt camera can capture the objects and send a signal to the remote control location in case of any emergency.
5) When can we see this wonderful invention be deployed in the real-world (for Naval forces and marine researchers)?
Ans: The skeletal structure and its actuation characteristics have been analyzed with varying frequency and varying SMA wire diameter. The SMA/polyimide-based jellyfish robot prototype has been developed and tested its locomotion characteristics in the laboratory level water channel. A detailed hydrodynamic analysis is under progress. It would take another year to deploy and test in the real world.
6) Where do you see the applications of Soft Robotics to be most useful in the coming years?
Ans: Soft robotics is going to have a significant impact on human-robot interaction where human safety is a major concern. The conventional robots made up of rigid links and joints will be replaced with soft structures and smart materials for handling complex shapes and soft objects. It will play an essential role in the development of bio-inspired robots which need soft skeletal structures and flexibility to mimic the living creatures for underwater surveillance applications accurately.
Biomechanics and Soft Robotics Lab, IIT Delhi
Professor Sitikantha Roy heads the soft robotics lab at Indian Institute of Technology Delhi. He has worked with his student Vivek Dorli to develop an EMG (Electromyographic) controlled soft-robotic hand-like manipulator. We had the opportunity to ask our queries on this field and its potential in future. We, as a result of this, bring you his enthusiastic replies:
Q1. What is the inspiration behind this project? When did this begin?
Ans: When we think of robots working in collaboration with humans or the prospect of wearable robotics, the current hard form factor makes little sense. The human body is soft in nature, and for man-machine to have a proper and useful meaning, a machine needs to be soft in its build. This basically is the motivation to embed automation control into soft material made shape-basically soft robots.
Our lab's research expertise is in biomechanics, smart material structure, and soft active material. Soft robotics need all of these in one single place, so naturally, we were inclined to work in this direction from the beginning itself.
Q2. What roadblocks and challenges did your team face while working on it?
Ans: There are a few technical challenges involved-
i. Modelling challenge: It is much more complicated than conventional hard robot modelling. Being soft brings material non- linearity into the picture. The governing equations are space and time-dependent partial differential equations (PDEs).
ii. Control system design challenge: Hard robots are a finite degree of freedom system. On the contrary soft robots have infinite DOFs. Naturally, control system design is challenging for inherently under-actuated, nonlinear systems.
Q3. Where do you see the potential future of soft robotics?
Ans: Huge. Every place wherever you see humans working in collaboration with robots in close proximity, soft robots will come into the picture. Industrial robotics revolution was mostly carried forward by hard robots; the next-generation collaborative robotics will be driven by soft robotics.
Q4. Is your lab collaborating with the industry and government on projects? Will we see any labs and private startups and companies that would soon bring soft robotics products into the market?
Ans: Yes. We are working with DRDO labs, private hospitals like ISIC etc.
There is enormous potential for startups taking soft robotic devices into the market. Wearable robotics, soft medical robotics, and soft robotics in space application are some of the areas of interest in our lab.
Robotics Lab, IIT Madras

Professor Asokan Thondiyath and his student Kumar Surjdeo Singh of Department of Engineering Design, IIT Madras have developed a soft bidirectional actuator for human-robot interactions. Their research paper “Design and Analysis of a soft bi-directional actuator for human-robot interaction” presents a fluid powered actuator that is quite different from the conventional ones used. Pneumatic or hydraulic modes are used to drive it. The advantage of this actuator will be in its capability to provide an extra degree of freedom for the same number of pressure inputs as compared to its conventional counterpart. It is also noteworthy that it can be modified to improve the actuation further. The paper states that the device needs to be “flexible, lightweight, and should be able to accomplish effortless grasping of a variety of objects”. This will prove to be of good use for a user who depends on a robotic device for performing daily activities, such as a person with a partially impaired hand.
Soft Robots influenced by biological models
Soft robots can come in different designs and shapes. Many of these come in shapes and styles of different animals and insects. The idea behind such robots was highly motivated by the advantages nature has granted to animals like octopuses and jellyfish. This trend is collectively called bio-inspired designs.
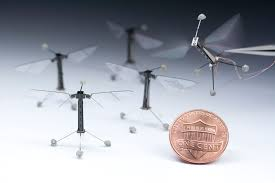
o Researchers at Wyss Institute, Harvard have developed robots named ‘Robobees’ using bees as an inspiration. They are about the size of a penny and powered by soft artificial muscles.
o MIT’s Computer Science & Artificial Intelligence Lab (CSAIL) have developed a soft robotic fish “SoFi”, capable of swimming along with real fish in the ocean. Robot fish can be beneficial in escape manoeuvres and can change direction in a fraction of seconds.
o The Octobot is a robot octopus, built by a team at Wyss Institute at Harvard, and it has no rigid parts whatsoever. It is pliable, with no batteries, no circuits, it is totally 3D printed out of silicon rubber. It is 6.7 inches in width and is smaller than an average human palm. It is powered by hydrogen peroxide which starts as a liquid, gradually transforming into gas and filling up the robot-like an inflated balloon.

o Researchers at UC Berkeley have created robotic cockroaches that can work for disaster search and rescue.
o Robotic worms and threads developed at MIT can crawl inside your bodies and may be used for medical purposes. These can be used to detect and treat blot clots and other surgical procedures.
o The X-shaped soft robot created by Whitesides Research Group at Harvard is made of silicon that uses a pneumatic system network embedded inside it. It is controlled by a simple Arduino board and can squirm over a fire, across ice and survive under a car tire.
o Versabal is a gripper forged by the University of Chicago and Cornell University. The main idea behind this is the “jamming transition” which is the jamming of granular objects to form a solid when vacuum packed but remains mostly liquid otherwise. It is a really efficacious suction cup. This is comparatively simpler than coding for the hand movements for a rigid robot which would also include functions of a finger.
Challenges faced by Soft Robots
Soft robotics is still a burgeoning field. Although a few robots have left labs and are out in the market, researchers are still anticipating their zenith.
It should be noted that the “soft, squishy” robots are not entirely “soft”. Some soft robots still consist of fundamental robot parts like circuits, batteries and other electronic components which are ‘hard’. These components work well and hence are still in use. This has posed a restriction for soft robots. Finding their “soft” alternatives is challenging, and the search is still going on. Besides, it becomes complicated to think of sources of power for delicate and small robots which can be flexible and pliable like the robot itself.
The task of instilling the capability of sensing the environment and reacting to the stimuli accordingly, is challenging, owing to the above point. Even if this is achieved, it would be tricky to manage such a system. There is also a considerable possibility of damage to the robot due to environmental changes.
The sole purpose of inventing any new technology is the improvement of the quality of work. The very idea of soft robots came from the necessity of robots that need to be agile and efficient. So apart from sturdy design, efficiency and quality would be a huge driving factor towards the usage of this technology. The immediate target is thus set, not to manufacture completely soft robots but almost soft robots.