

Till date, fifteen artificial objects succeeded to touch the surface of Mars and the engineers and scientists at NASA have launched one more rover and a helicopter on July 30 this year. In history, the date July 20, 1976 witnessed the first-ever successful landing of an artificial body sent from Earth to the Martian surface. The mission was composed of two spacecraft Viking 1(lander) and Viking 2(orbiter) whose primary objectives were to obtain high-resolution images of the Martian surface and to understand its geology and habitability potential. After 44 years of further advancements in technology, today the scientists and astronomers at NASA are standing at the edge of creating a new history by lifting an artificial body in the atmosphere of another planet for the first time.
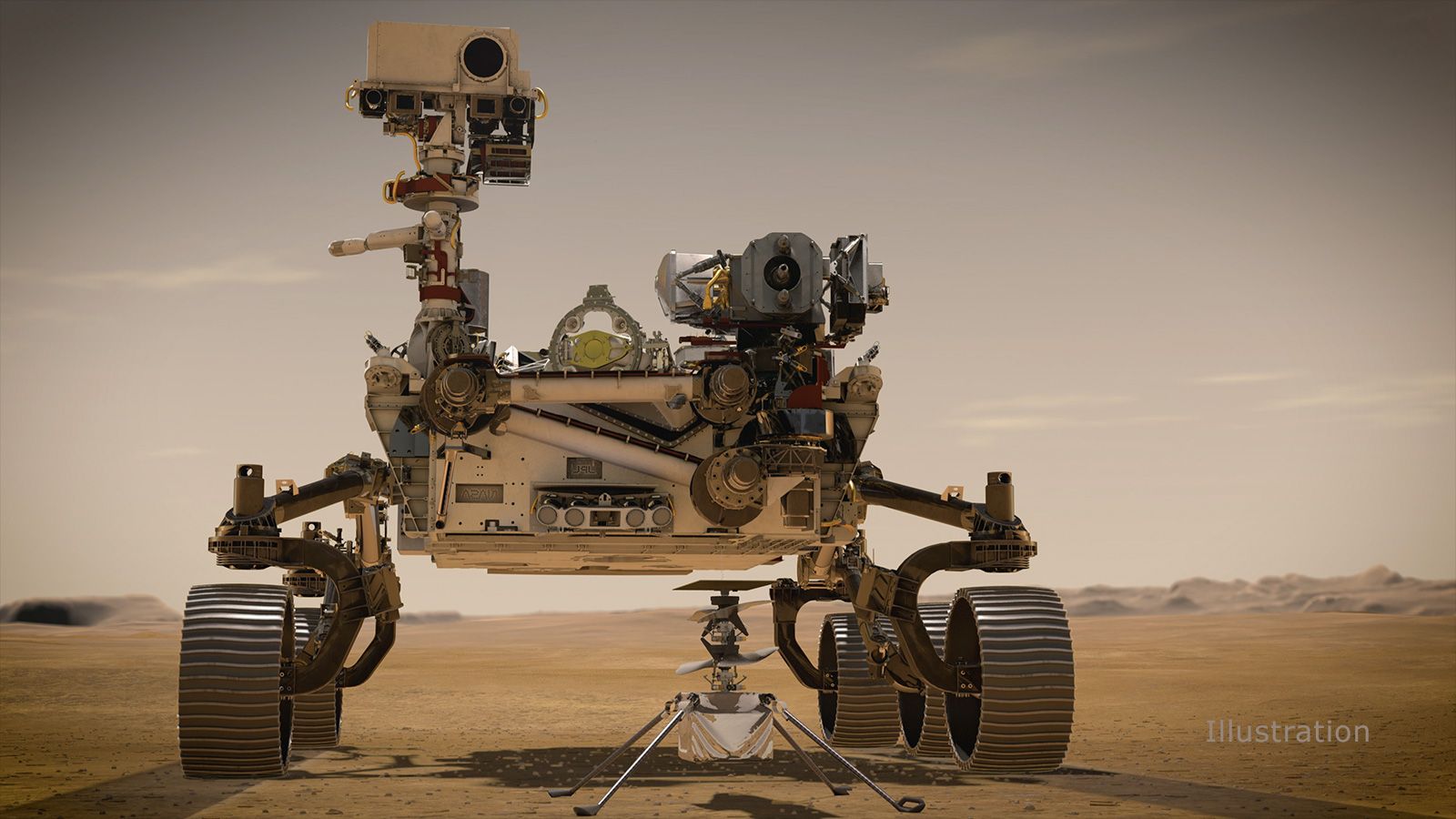
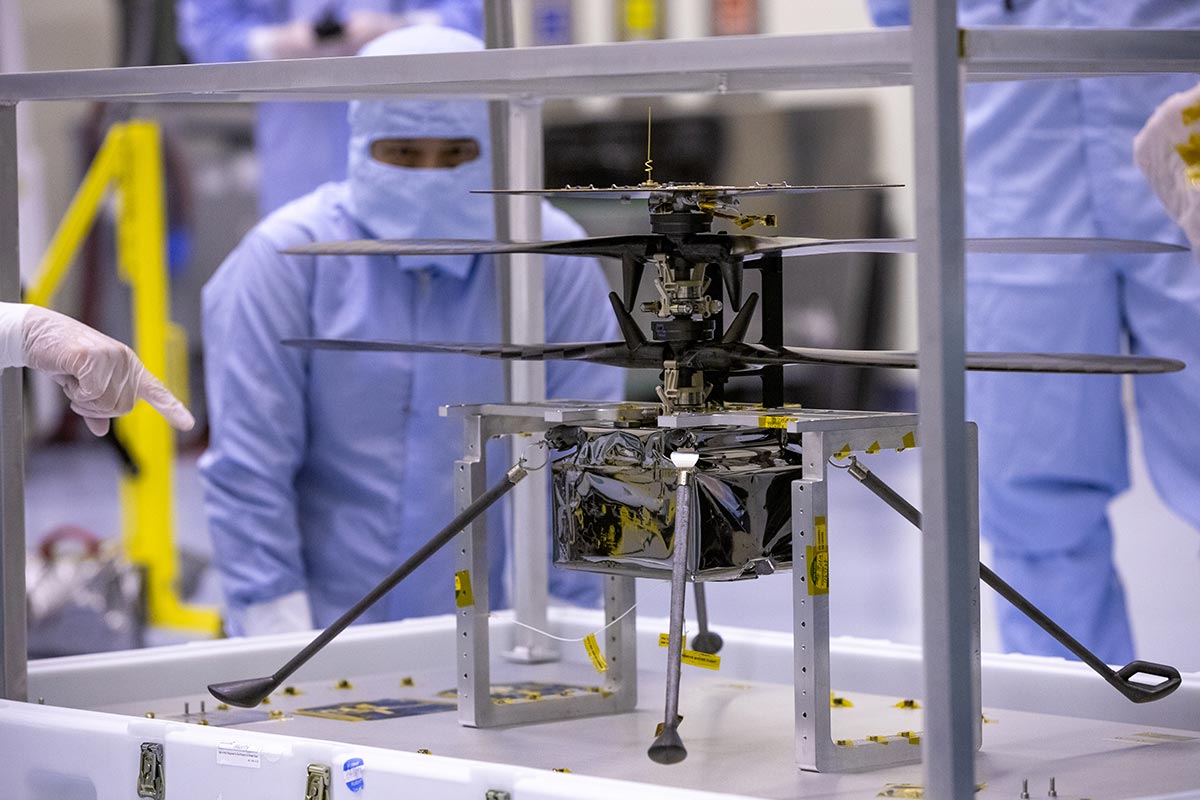
The Mars Helicopter is a small, autonomous aircraft which is on its way to the surface on the Red Planet attached to the belly of the Mars 2020 rover named “Perseverance”. The Mars Helicopter had passed the final phase of testing in August 2019 and mechanically connected to the belly of the Mars 2020 rover. It will land on the surface of Mars in February 2021, as predicted by NASA. Destined to become the first aircraft to attempt powered flight on another planet, NASA's Mars Helicopter officially has received a name: Ingenuity. If the helicopter does take flight as designed, future Mars missions will be revolutionised with the addition of aerial dimension to the planet explorations.
“Exploring the Red Planet with Mars Helicopter exemplifies a successful marriage of science and technology innovation and is a unique opportunity to advance Mars exploration for the future,” said Thomas Zurbuchen, Associate Administrator for NASA's Science Mission Directorate.
But why is lifting a body a difficult task on Mars?
The Atmosphere on Mars:
Researchers believe that long ago, the Martian atmosphere used to be thick that retained enough heat for liquid water to exist. But with time the Mars lost a significant amount of atmosphere leaving behind a deserted and frozen environment today. Compared to the Earth, the air is thinner at the surface of Mars, with pressure about 0.6% of Earth’s sea level and gravity is lower (approx one-third of gravity on Earth). Flying on mars with such atmospheric conditions is equivalent to flying on Earth at 100,000 feet (30,500 meters) altitude -- about seven times higher than a typical terrestrial helicopter can fly.
Aerodynamic force is directly related to the air density flowing past the body. 'Lift' is created by deflecting a moving fluid (liquid or gas) and depends linearly on the density of the fluid. At places where fluid density is less, flight is nearly impossible.
Ingenuity Flight Dynamics:
The key parameter affecting the aerodynamic properties of the Mars Helicopter is the density, which is 1-2% of Earth density at sea level. Clearly, the thin atmosphere reduces the achievable thrust for a given rotor size; beyond that, however, it also affects the flight dynamics of the vehicle in ways that must be well-understood in order to design a control system.
Besides gravity, the main forces on a helicopter are due to the rotor interacting with the surrounding atmosphere. The rotor is a dynamical system whose properties largely determine the flight characteristics of the vehicle as a whole. Of particular importance for the helicopter flight dynamics is the dynamics of rotor blade flapping; that is, the out-of-plane motion of the rotor blade that occurs when the blade is subjected to forces. Many helicopters have hinges that allow the blade to flap, but even for hingeless helicopters like the Mars Helicopter, blade flapping occurs due to elastic deformation of the blade.
The thin Martian atmosphere significantly affects the dynamics of blade flapping by reducing the level of aerodynamic damping. This alters the response of the helicopter rotor to periodic inputs, including cyclic control inputs; in particular, the forces and moments on the helicopter fuselage in response to such inputs tend to be oriented differently when compared to similar inputs on Earth helicopters.
Furthermore, the poorly damped flap dynamics gives rise to poorly damped, oscillatory modes in the overall flight dynamics, called the regressing and advancing flap modes. The existence of such modes represents a problem due to the danger of the control system coupling with the modes and potentially destabilizing them. Due to this issue, it was determined early in the design process that the Mars Helicopter would need to be designed with unusually stiff blades, with a rotating flap frequency of about 80–90 Hz. This has the effect of moving the poorly damped modes to frequencies high enough not to interfere with the control system. A drawback of the stiff rotor design is an increased sensitivity to gusts, which also worsens the open-loop unstable behaviour of the helicopter.
To overcome the problem of low lift from a thin atmosphere, the engineers at NASA designed a rotor system with two counter-rotating blades placed co-axially. In layman's terms, one of the blade pulls in the air from outside and concentrates it in the space between the two blades, and the other blade borrows its lift from that concentrated flow of air. The two blades have opposite senses of rotation, because with the same sense of rotation enough concentrated flow cannot be generated between the two blades, thus reducing the lift.
The Helicopter Idea:
Being part of NASA’s Mars Exploration Program, Bob Balaram (an IIT Madras alumnus) solved the problem by developing a lightweight, autonomous, twin-rotor, solar-powered helicopter. Bob Balaram is the inventor of Ingenuity. He innovated the design and testing environments working as a chief engineer of NASA’s Mars Helicopter Project. MiMi Aung was the head project manager.
Bob’s mind ignited with the idea of Mars Helicopter when he was attending a professional conference in Stanford, where a professor spoke about “mesicopter,” a miniature rotorcraft. The idea got affirmative reviews from researchers and scientists. Although the helicopter idea was not selected as an instrument, it was funded for technology development.
"In the early days of this project, the feasibility of flying at Mars was questioned," said MiMi Aung, Mars Helicopter project manager at JPL. "But today we have a helicopter down at the launch site, installed on the rover and waiting to board the rocket which will carry us to the Red Planet."
As a technology demonstration, Ingenuity is a high-risk, high-reward experiment. The helicopter is hitching a ride to Mars attached to the belly of the Perseverance rover. For several months following the rover's landing, Ingenuity will remain encapsulated in a protective cover to shield it from debris during entry, descent and landing. When the timing in the rover mission is right, Ingenuity will be deployed to stand and operate on its own on the surface of the Red Planet. If the 4-pound (2-kilogram), solar-powered craft — a combination of specially designed components and off-the-shelf parts — survives the cold Martian nights during its pre-flight checkout, the team will proceed with testing.
Tech Specs of Ingenuity:
The main challenge in front of Bob was to develop a helicopter with rotor systems powerful enough to lift the whole body in the thin atmosphere of Mars keeping it lightweight at the same time. Started in August 2013 as a technology development project at NASA’s Jet Propulsion Laboratory, the Mars Helicopter had to hold new perspectives to the future science, discoveries and exploration missions to Mars. In May of 2016, a full-scale prototype with a rotor diameter of 1.21 m was flown under simulated Mars atmosphere conditions in the JPL 25-foot diameter environment chamber. The helicopter was of a coaxial rotor design with a cyclic and collective on the lower rotor. The test was conducted with the chamber evacuated to vacuum and backfilled with carbon-dioxide gas to a density of 0.0175 kg per metre cubed.
After designing, testing and redesigning for four years, in May 2018 Bob and his team came up with an end result as described:
- Structure: The helicopter is built around a central mast - a hollow structural tube that runs from the top of the helicopter to the bottom. Within this tube are the wires from the Electronics Core Module (ECM) to the propulsion motor, elements, and the host spacecraft. The mast tube is designed to be stiff so as to minimize control interactions, as well as have low thermal conductivity to minimize thermal leakage into the ECM. Total weight is about 4 pounds on Earth, 1.5 pounds on Mars. This small but an ingenious device is embedded with latest technical instruments. The Helicopter will be attached to the rover through upper launch lock which will provide power and communications prior to deployment. The solar panels, cells and two rotors are attached to the mast which will be the main power system of the copter. The sensor assembly contains all the sensors and measuring instruments like inclinometer, altimeter and cameras. The landing gear mounting plate consists of a plate to which are connected to 4 light-weight legs.

- Power: Solar panel attached to the body that charges Lithium-ion batteries, providing enough energy for one 90-second flight per Martian day (~350 Watts of average power during flight). The helicopter battery consists of 6 Li-ion cells with a capacity of 2 Ah. The maximum discharge rate is greater than 25 A with the maximum cell voltage of 4.25 V. It also contains a heating mechanism to keep it warm through the cold Martian nights. The Helicopter Power Board has two DC/DC converters that will help in regulating the battery voltage. The solar panel is made from Inverted Metamorphic cells which has 32% greater efficiency. The cells are optimized for the Mars solar spectrum and occupy a rectangular area with 680 sq. cm of the substrate (544 sq. cm active cell area) in a region centered and immediately above the coaxial rotors. This region minimally interferes with the flow through the rotor.
- Processors: A three-level fault-tolerant computing architecture is used. The 2.26 GHz Quad-core SnapdragonTM 801 processor with Linux Operating system is used along with a Universal Asynchronous Receiver Transmitter, a Serial Peripheral Interface and General Purpose I/O . This processor implements visual navigation via a velocity estimate derived from features tracked in the camera and filter propagation for use in flight control, data management, command processing, telemetry generation, and radio communication. The avionics consists of 5 printed circuit boards which form the 5 facets of the Electronic Core Module cube, enclosing the 6-cell lithium-ion battery pack
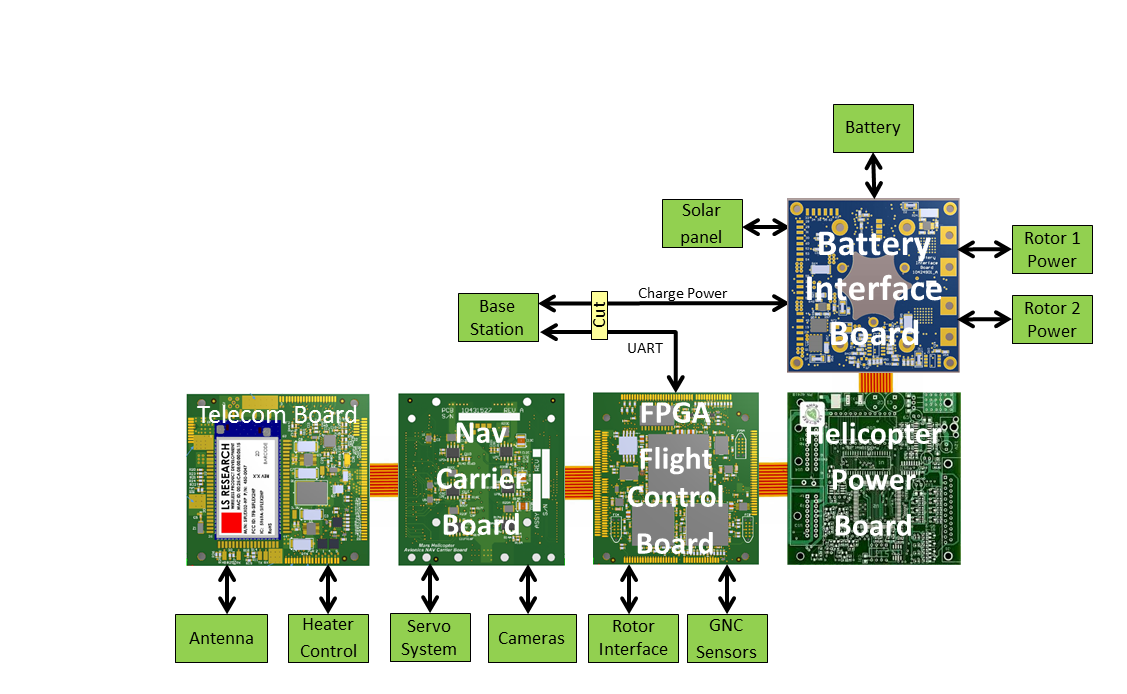
- Telecommunication System: Wireless communication will take place through radio antennas at the top of entire helicopter assembly to be commanded from the Earth via the Mars 2020 rover and the Mars orbiters. Communication with the rover will take place through a radio link called Zig-Bee, a standard 900Mhz chipset attached both to rover and helicopter. A one-way data transmission mode is used to recover data from the helicopter in real-time during its brief sorties. When landed, a secure two-way mode is used. Due to protocol overhead and channel management, a maximum return throughput in the flight of 200 kbps is expected while two-way throughputs as low as 10 kbps are supported if required by marginal, landed circumstances.
- Rotor System: The design uses two 4 feet (1.2 meters) long counter-rotating rotor systems that spin up to 2,800 revolutions per minute – about 10 times the rate of a helicopter on Earth. It provides a lift as well as the forces required for the directional control of its trajectory. The rotor is very stiff with a very high flap frequency and is fabricated from carbon fiber composites powerful enough to lift the whole helicopter assembly up to an altitude of 15 feet. The rotors are actuated with a custom 46 pole brushless motor with solenoid wound teeth using rectangular copper wire. Three DC motors operating through a 4-stage gear-box control the height and tilt of each swashplate.

- Sensors and Cameras: Equipped with inertial sensors, a laser altimeter and two cameras. Sensors collect data on how fast the helicopter is travelling and in which direction. Cameras help the helicopter see. A 4000 pixels colour camera, and a Video Graphics Array black-and-white camera is mounted on the copter. The inconsistent Mars magnetic field precludes the use of a compass for navigation, so it will use a solar tracker camera integrated to JPL's visual-inertial navigation system. At the heart of the helicopter, avionics is a Field-Programmable Gate Array (FPGA). The FPGA performs vehicle flight control including an attitude control loop operating at 500 Hz, an outer motor control loop, waypoint guidance, sensor I/O from the IMU, altimeter and inclinometer, and analog telemetry for current and temperature sensing.
- Landing System: The landing system consists of 4 legs made of tapered carbon fibre/epoxy tubes. The feet are designed to prevent the leg from digging into soft landing surfaces. The landing system provides for a passive drop onto the ground from a height of 0.3 m with only limited attitude rate control activities during the final contact event with the ground. The landing gear is designed to allow the landing on the surface with slopes up to 10 deg in any direction with the vehicle at an additional roll angle of 30 deg. Vertical velocity at the height where the passive gravity drop is initiated can be as high as 2.5 m/s.
Objectives of Mission:
The major purpose of the Mars 2020 mission is the successful landing of “Perseverance” rover on the Martian surface. It will not only continue to explore the past habitability of the planet but also search for the ancient microbial life. It is designed to examine the minerals present in the soil and rocks at the surface of Mars. It will collect the samples of soil and sediments in a tube for potential return to Earth by later missions.
Even if the Helicopter project encounters difficulties in its operation, the science gathering mission of Perseverance will not be affected. The objective of sending an autonomous helicopter on the surface of Mars is the demonstration of technology, and to serve as a proof of concept for the addition of an aerial dimension to space exploration in future missions. This has a tremendous advantage over land exploration options, as a helicopter can easily access, navigate and map terrain that cannot be accessed by land rovers, and can also act as a scouting agent for future missions.
Soon after the rover lands on the planet’s surface, a suitable location will be found to deploy the helicopter down from the vehicle and place it onto the ground. The rover then will be driven away from the helicopter to a safe distance from which it will relay commands. After its batteries are charged and tests are performed, controllers on Earth will command the Mars Helicopter to take its first autonomous flight in history. Its performance during the tests will directly affect the decisions relating to the consideration of helicopters and aircraft for future Mars missions. According to NASA’s Mars Exploration website:
“The Mars Helicopter is a technology demonstration to test powered flight on another world for the first time. It is hitching a ride on the Mars 2020 rover. A series of flight tests will be performed over a 30-Martian-day experimental window that will begin sometime in the spring of 2021. For the very first flight, the helicopter will take off a few feet from the ground, hover in the air for about 20 to 30 seconds, and land. That will be a major milestone: the very first powered flight in the extremely thin atmosphere of Mars! After that, the team will attempt additional experimental flights of incrementally farther distance and greater altitude. After the helicopter completes its technology demonstration, the Mars 2020 rover will continue its scientific mission.”
NASA clearly stated that the Mars Helicopter project is solely a demonstration of technology which is developed for testing and analysing the aerodynamic forces applied by the thin air of the Martian atmosphere. The results of the tests will further give shape to the aerial exploration of Mars and other planetary targets with the atmosphere.
Despite the best effort and best testing on Earth, Balaram says quite frankly, “there is a risk that we could fail. But if it succeeds on Mars it will be kind of a Wright Brothers moment on another planet.”
